Introduction
The project was developed to obtain a bachelor’s degree in electronic technology; the research consisted of controlling a machine by computer vision, using different techniques to segment the image and detect patterns to detect the correct face position, eyes, and eye tracking. The probes were implemented in an elevator prototype inside the educational institution called Institucion Universitaria Antonio Jose Camacho, successfully controlling the machine through an interface by standard port with an Arduino Mega 2650 that sends the control signals to the elevation by a custom board controller that activates the input port of the PLC Siemens S7200-226 Version 2 that control the actuators of the machine.
Wavelet Transform
A Wavelet transformation is based on a short-duration waveform whose average value is equal to 0. This type of transformation tries to decompose the primary signal into sinusoidal signals of 7 different shapes. Frequency. In the analysis using the Wavelet transformation, the decomposition of the arbitrary wave f is carried out in the form of waves scaled and displaced from the original Wavelet. As the author explains, this process represents any function as a superposition of Wavelet waves.
Face Detection
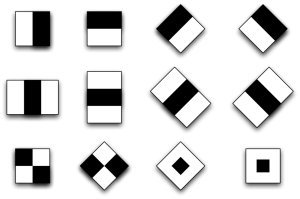
For face detection, it is necessary to study 3 necessary foundations such as the concept of integral image, Adaboost and classification cascades. The concept of integral image is an image representation that allows the detection of features very quickly. This concept focuses on the use of a group of basic Haar features. This foundation allows the computerization of an image, performing operations with very few pixels, which can be done at any scale, location or in a constant time. The second foundation, known as Adaboost, is a teaching system that allows the creation of classifiers by selecting a small group of characteristics. The article mentions that in any sub-image of an image, it is possible to find a relatively large number of Haar features, more than the number of pixels in the image. To develop a good classifier, it is necessary that the learning process excludes most of the features and focuses on the properties. Main ones to analyze. For this process, the authors edited Adaboost to depend on a single feature, thereby improving the selection of weak classifiers for creating the cascade. The last foundation in the article is the classification cascades; these require the successive combination of many classifiers in a cascade structure, increasing the time of the detection and analysis procedure of the image regions.
Eyes Detection
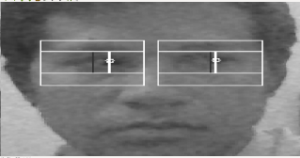
The detection of the eyes was carried out based on the area where the person’s face is detected; the section of the image is where the eyes are possibly located. Specifically, it focuses on the location of the left eye, where it is generated. An estimate of the center of the eye is needed, and then the same action is performed in the right eye. Gradually, vector analysis is used to detect the position of the eye pupil. The direction of each gradient vector is used to draw a line across the entire image so that when passing through the center, a system accumulator will allow you to find the center of the eye in the place where the most significant number of lines cross.
System Development
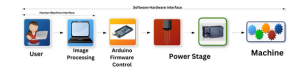
The block diagram that explains how the proposed system was roughly developed to explain further the systems involved in each stage: as seen in the human-machine interface, the user with disabilities will be in charge of sending orders through the movement of the pupil, followed by the order given by the user, the camera takes an image, and the computer digitally processes it through the libraries from Opencv. Furthermore, with a series of modifications to this same program, it was achieved that the software, depending on the user’s order, made a signal through the USB port, which would be interpreted by another device to control the plant, thus ending the Human-Machine interface. After the man-machine interface, communication continues through the RS232 protocol through the computer’s communication port with the Arduino development board. Furthermore, since the development platform cannot directly control the plant, it is necessary to build a power stage that controls the plant depending on the signals delivered by the Arduino system.
Conclusions
- The software interface was developed through the OpenCV libraries. The hardware was made up of three stages: the communication that was carried out through the computer with the Arduino Mega 2560 development board, the coupling stage with transistors configured as a switch through the cut-saturation and finally, the power stage was developed in the Siemens S7200-226 version 2 PLC.
- The transversal algorithm works for a disabled person and an average person with ocular mobility.
- For facial recognition, the Opencv libraries were used, which make use of the Wavelet transform, the Haar characteristics for the analysis of corners, edges and intensity of fundamental pixels for face detection, and the construction of Haar cascades, which allow the reduction of false positives in the facial recognition task.
- The tests and results showed that the best operating distance of the system is between 50cm and 75cm, with an effectiveness of 62% concerning the total successes, with an error of 27%.
- Regarding the number of hits, the best is to work at a distance of 75cm with a total of 7 hits from 21 samples with a percentage of 33%.
- This research allowed the appropriation of new knowledge not learned in the technological career.
- According to the robustness test carried out previously, it can be observed that the Arduino control system with the PLC presents high reliability and robustness.
- With the development of this project, academic and professional growth occurred because it allowed the consolidation of knowledge learned during the degree, in addition to appropriating new knowledge necessary for the complete system development.